ISO 22081:2021 – Všeobecné/Obecné geometrické tolerance dle ISO GPS – ČÁST 1
V této sérii příspěvků bych rád nastínil problematiku všeobecného tolerování v rámci ISO GPS dle nově zavedené normy ISO 22081 (ISO 22081:2021 – Geometrical productspecifications (GPS) – Geometrical tolerancing – General geometrical specifications and general size specifications ), která platí od září 2021. Ke stejnému datu byla zrušena norma ISO 2768-2 , tedy část, která se týkala geometrických tolerancí (nyní již nelze předepisovat třídy přesnosti geometrických tolerancí – „H“, „K“ nebo „L“). V nové normě byly přidány a upřesněny pravidla pro aplikaci všeobecných/obecných geometrických a rozměrových specifikací. Dříve byl zažitý pojem všeobecné tolerance, ale nově bych měl používat pojem obecné, tak se na mě nezlobte, kdybych to sem tam zaměnil.
V tomto prvním příspěvku bych rád nastínil důvod zrušení a tedy také důvody proč byla zavedena norma ISO 22081, která určitým způsobem mění přístup v tolerování a obecně kótování výkresů/dílů.
Hlavní důvody zrušení ISO 2768-2
Pokud se podíváme na historii normy ISO 2768-1(2), tak si dovolím napsat, že od jejího prvního vydání v roce 1989 neproběhla žádná její zásadní úprava. Ovšem pokud se podíváme na plno dalších norem, tak ty se začaly měnit s ohledem na způsob výroby, a hlavně na způsob kontroly, tedy metrologii. Dovolím si napsat, že tento proces změn/úprav odstartoval okolo roku 2010.
Zásadní změna nastala aktualizací normy ISO 8015:2011 , a tedy i zavedením celého systému ISO GPS (Geometrical Product Specifications) do tvorby výkresové dokumentace (TPD – Technical product documentation).
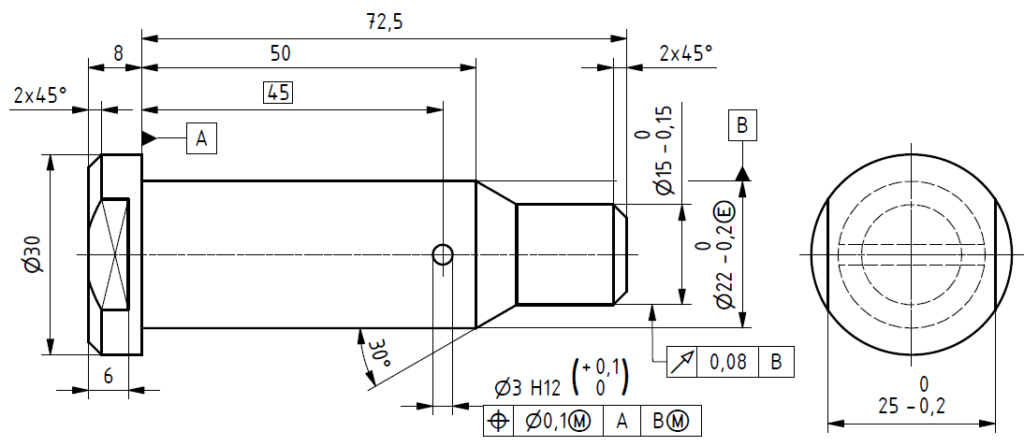
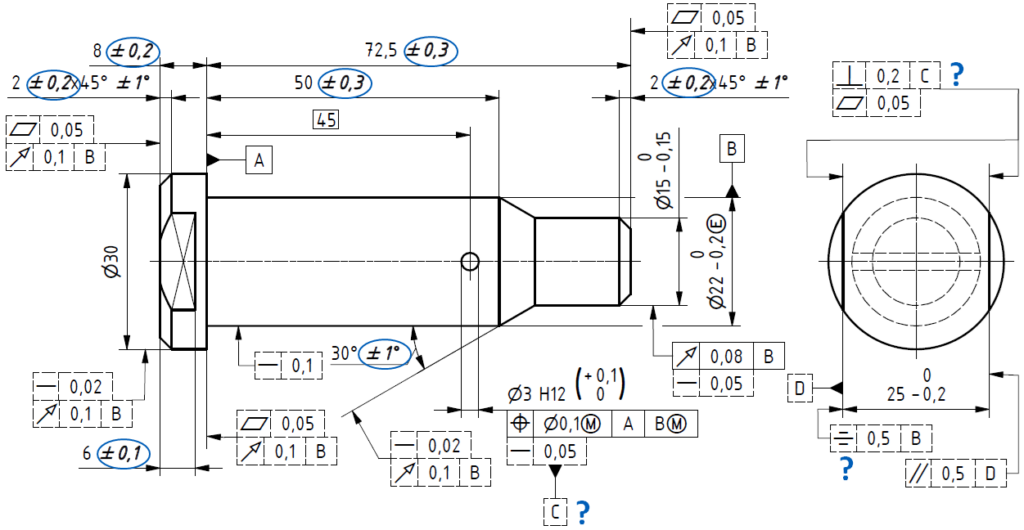
Pokud se podíváme na Obr. 1, který byl uveden v normě ISO 2768 a celé roky sloužil jako „mustr“, tak si dovolím napsat, že v některých případech jsou aplikované tolerance v rozporu/nesouladu s ISO 8015. Na Obr. 2 jsou znázorněny všeobecné geometrické tolerance (vyznačeny čárkovaně) a všeobecné rozměrové tolerance (vyznačeny kurzívou).
Jestliže se zamyslíte nad způsobem tolerování dle ISO GPS, tak si uvědomíte, že se mají tolerovat jen ROZMĚRY (jeden z důvodů je jejich měřitelnost na CMM /Coordinate-measuring machine/ a na skenerech ). Nyní ještě nastává otázka: „Jak se chovat ke VZDÁLENOSTI? Ve smyslu, když ji chceme považovat za funkční. Vzdáleností označujeme jiné než lineární a úhlové rozměry (neměřitelné správně posuvným měřítkem). Pokud se podíváte na Obr. 2, tak v modrém kroužku jsou uvedeny všeobecné rozměrové tolerance dle ISO 2768-m, které jsou aplikovány na vzdálenosti (tedy né úplně v souladu s ISO 8015 a tedy i ISO GPS) – kromě „8 ±0,2“ (můj překlep 🙂 ). Obdobně můžeme diskutovat nad tím, proč je zrovna základna „C“ volena jako osa díry o průměru „3 H12“ (údaj s modrým otazníkem) nebo proč je použita kolmost vůči „C“ či souměrnost. Holt v některých případech to není úplně jasné a jednoznačné – rozpor s ISO GPS.
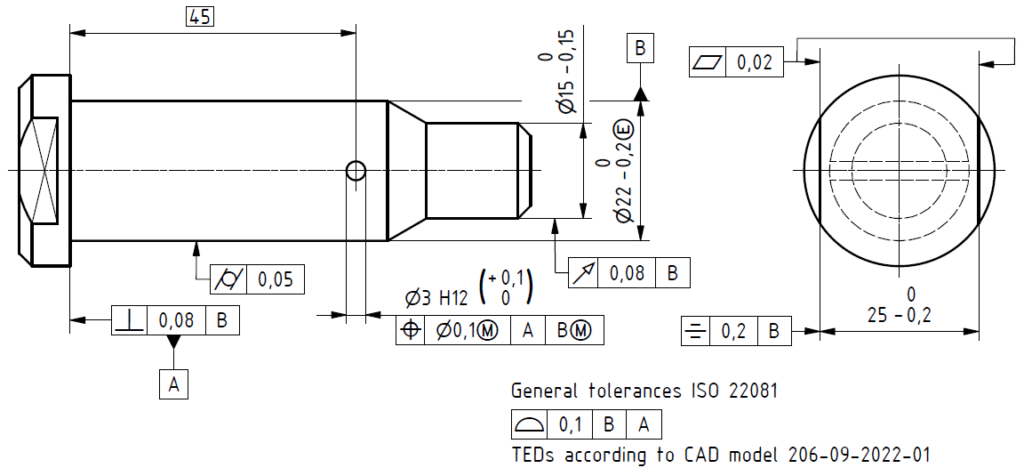
Pro případnou další diskusi a možná také pro upoutání si dovolím přidal možné řešení součásti dle Obr.1 podle ISO 22081, které je znázorněno na Obr. 3. Předpokládám, že v další části této série příspěvků se k tomuto obrázku vrátím. Samozřejmě můžete připojit své názory, zda by součást takto mohla vypadat.
Důvody zavádění ISO 22081 místo ISO 2768 – můj názor
Důvodů může být celá řada, ale já si dovolím vyzdvihnout alespoň tři, které mi připadají jako zásadní. Některé jsem již možná zmiňoval výše.
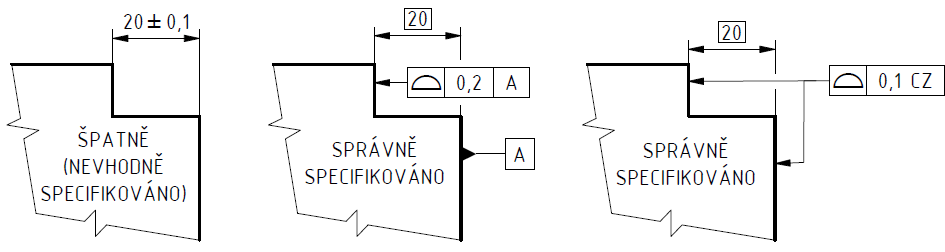
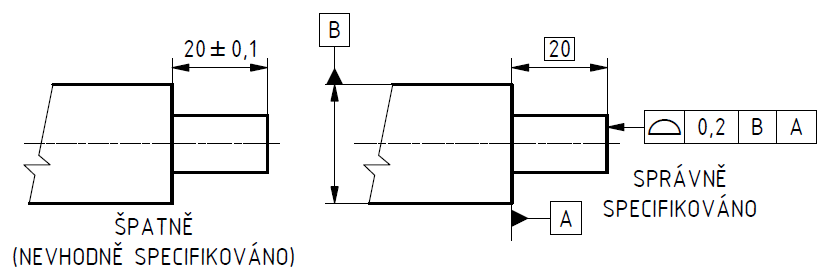
- Nesoulad s ISO 8015 (ISO GPS), možná mohu konkrétně zmínit VZDÁLENOST vs. ROZMĚR. Možná mohu napsat, že vzdálenost by nikdy neměla být tolerována, tedy neměla by u sebe mít mezní úchylky. Typickým příkladem může být vzdálenost „20 ±0,1“ uvedená na Obr. 4 vlevo, která reprezentuje příklad nevhodně specifikované vzdálenosti. S ohledem na měření by měla být tato vzdálenost specifikována pomocí geometrického tolerování (v souladu s ISO GPS). Uprostřed je uvedena varianta s tolerancí polohy a základnou a vpravo varianta s tolerancí polohy a symbolem „CZ“ (kombinované pole). Lze konstatovat, že tento způsob tolerování souvisí hlavně s následujícím bodem (bod 2).
- Jiný přístup ke kontrole součástí, a to hlavně vzhledem ke kontrole pomocí CMM a skenerů (metrologie). Vzdálenost uvedena na Obr. 4 nebo na Obr. 5 není správně měřitelná a vyhodnotitelná na CMM nebo na skenerech. Pro tyto přístupy k měření/kontrole je potřeba tyto rozměry kótovat/tolerovat pomocí geometrických tolerancí a nejlépe těch, které ke své funkci potřebují TED (teoreticky přesné rozměry /profil plochy, profil čáry a poloha/) – viz bod 3. Nyní se naskýtá otázka, když nepoužívám tento způsob měření musím něco měnit? A můžeme odpovědět, že v podstatě nemusím. Přístup tolerování a kótování podle ISO GPS předpokládá vyšší automatizaci, omezení lidského faktoru a tím dosažení vyšší produktivity a sjednocení kvality stejných výrobků napříč závody (můj názor k budoucímu vývoji).
- Pozvolný nástup bezvýkresové dokumentace – 3D modely (3D annotation models). Nástupem bezvýkresové dokumentace, a tedy umísťováním funkčních specifikací (funkční rozměry, tolerance apod.) do 3D modelu je potřeba změnit přístup v kótování. Takto zadefinované 3D modely je možné následně používat v software pro výrobu (CAM) a měření (metrologii). Hlavní výhoda je v tom, že není potřeba cokoliv přepisovat do 2D výkresu a následně z 2D výkresu např. do měrového software – eliminace chyb, zrychlení procesu tvorby výkresové/technické dokumentace. Nyní se ještě vrátím k změně přístupu v kótování. Pokud neuvedu veškeré rozměry/vzdálenosti do 3D modelu (PMI kóty) a napíši, že si je mám změřit, tak nemohu používat standartní ± tolerování. Proč? Protože by každý mohl měřit jiné rozměry, takže musím použít TED rozměry (napíšeme něco ve smyslu: „neuvedené rozměry bereme jako TED dle CAD modelu č. … „). A na takto použité TED rozměry mohu aplikovat tolerance pomocí geometrických tolerancí (profil plochy, profil čáry a poloha). Tímto způsobem je nastavena ISO 22081.
Tímto bych tuto první část ukončil a doufám, že se mi povedlo nastínit zásadní důvody zavedení ISO 22081 do výkresové dokumentace. Příště budu pokračovat ukázkou všeobeckého/obecného tolerování dle ISO 22081.
Jan Brandejs
Zdravím pane inženýre,
v poslední době vidím často předepisování kolmosti a souososti u rotačních součástí namísto dříve používaného čelního a obvodového házení. Pominu-li rozdílný tvar tolerančního pole, souvisí to s obtížnějším měřením a vyhodnocováním pomocí CMM?